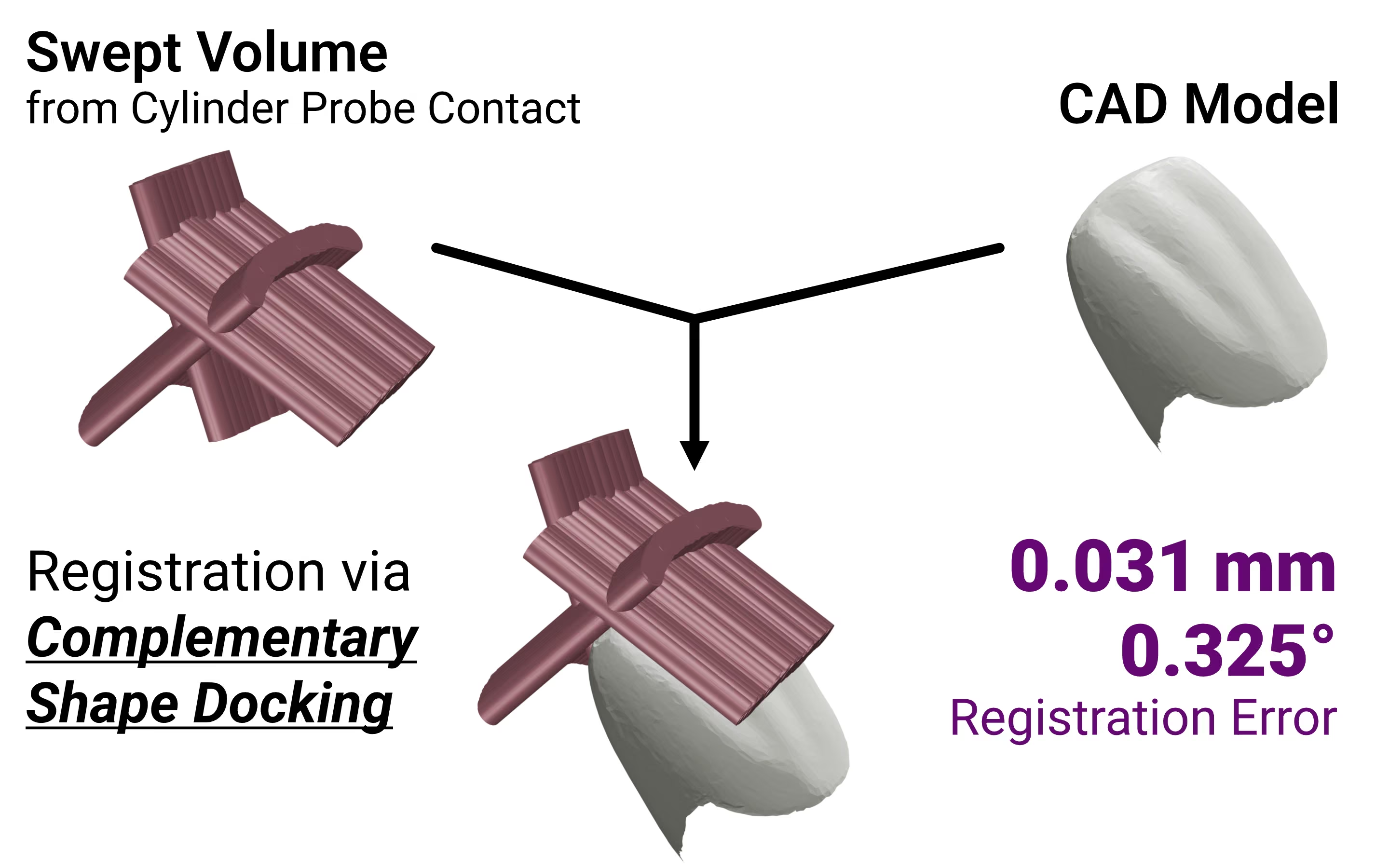
Accurate registration between a prior model and the real scene is essential for high-precision robotic manipulation, yet optical methods suffer from long calibration chains, line-of-sight constraints, and fabrication errors. We propose a calibration-free alternative that reformulates contact registration as complementary-shape docking between the object and the probe’s swept volume, explicitly accounting for probe geometry and leveraging both contact and non-contact evidence. Our solver integrates a global-to-local search via 3D FFT correlation over low-discrepancy SO(3) samples, then followed by continuous SE(3) refinement using Lie-algebra updates and analytic contact sensitivities. This pipeline yields efficient exploration and metric-grade convergence without fragile point correspondences. Simulation across free-form meshes achieved sub-0.04 mm and sub-0.4° accuracy and robustness to pose noise and contact loss. On a tooth-preparation robot, our method attained 0.42 mm and 3.75°, outperforming an optical tracker registration while requiring no external sensors. These results demonstrate a practical and precise registration strategy for surgical and industrial robots.
@inproceedings{chen26swept,address={Vienna, Austria},archiveprefix={arXiv},author={Chen, Chen and Li, Yunwen and Xu, Yifan and Yan, Xiangjie and Shu, Chang and Hou, Jianxia and Song, Shiji and Li, Xiang},booktitle={2026 IEEE International Conference on Robotics and Automation (ICRA)},doi={10.48550/arXiv.2605.21398},month=jun,publisher={IEEE},title={From Swept Contact to Pose: Probe-Aware Registration via Complementary-Shape Docking},year={2026}}
Visual Attention Based Cognitive Human–Robot Collaboration for Pedicle Screw Placement in Robot-Assisted Orthopedic Surgery
Chen Chen, Qikai Zou, Yuhang Song, and 4 more authors
In 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct 2024
Best Paper Award - Runner Up, in C4SR+ workshop @ IROS 2025 Best Paper Award (3rd place), in EIMR workshop @ IROS 2025 Best Poster Award, in SASA workshop @ IROS 2025
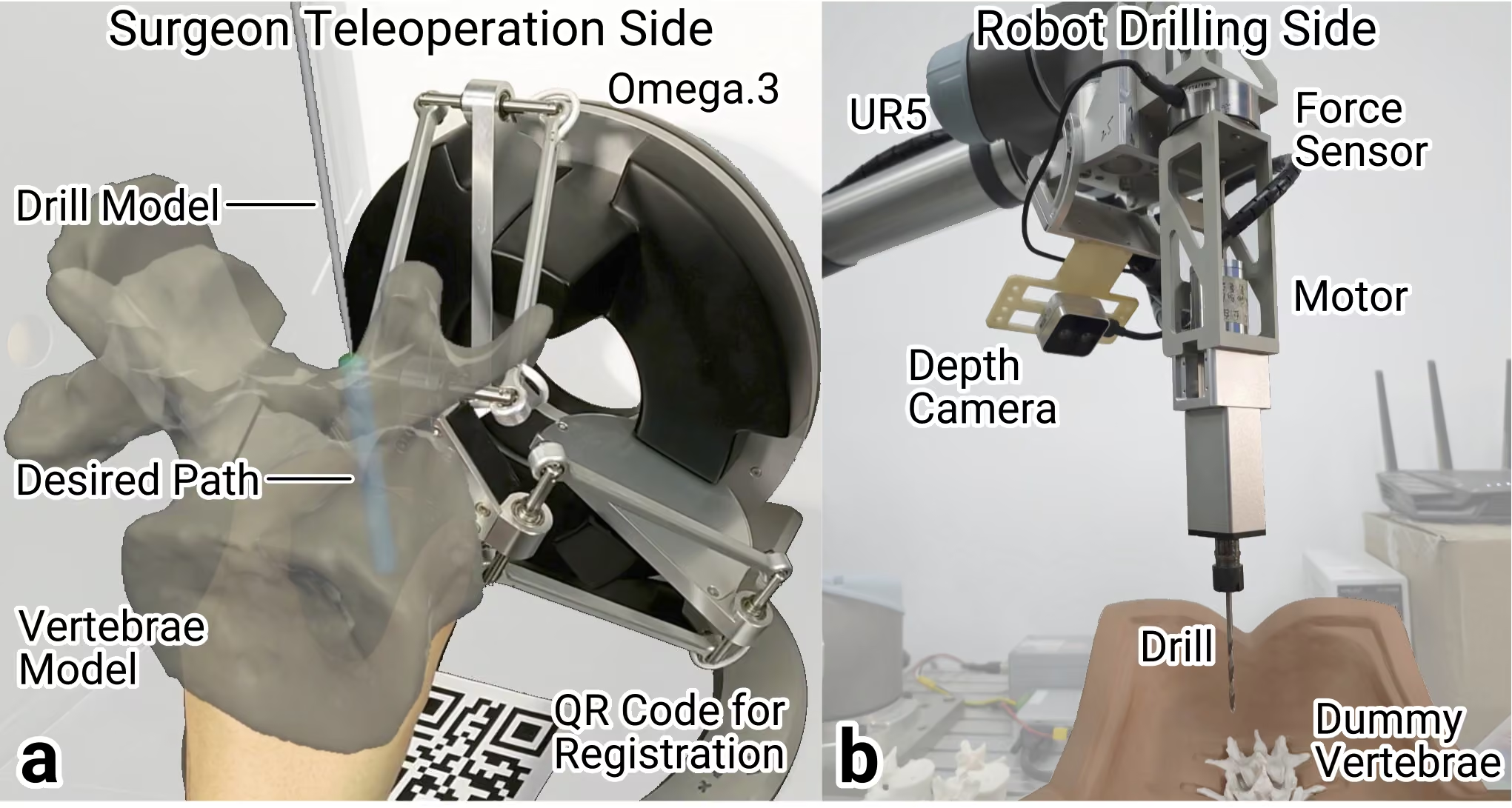
Current orthopedic robotic systems largely focus on navigation, aiding surgeons in positioning a guiding tube but still requiring manual drilling and screw placement. The automation of this task not only demands high precision and safety due to the intricate physical interactions between the surgical tool and bone but also poses significant risks when executed without adequate human oversight. As it involves continuous physical interaction, the robot should collaborate with the surgeon, understand the human intent, and always include the surgeon in the loop. To achieve this, this paper proposes a new cognitive human–robot collaboration framework, including the intuitive AR-haptic human–robot interface, the visual-attention-based surgeon model, and the shared interaction control scheme for the robot. User studies on a robotic platform for orthopedic surgery are presented to illustrate the performance of the proposed method. The results demonstrate that the proposed human–robot collaboration framework outperforms full robot and full human control in terms of safety and ergonomics.
@inproceedings{chen2024visual,address={Abu Dhabi, United Arab Emirates},author={Chen, Chen and Zou, Qikai and Song, Yuhang and Yu, Mingrui and Zhu, Senqiang and Song, Shiji and Li, Xiang},booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},doi={10.1109/IROS58592.2024.10801930},isbn={979-8-3503-7770-5},month=oct,pages={7078--7084},publisher={IEEE},title={Visual Attention Based Cognitive Human--Robot Collaboration for Pedicle Screw Placement in Robot-Assisted Orthopedic Surgery},year={2024}}
Independence in the Home: A Wearable Interface for a Person with Quadriplegia to Teleoperate a Mobile Manipulator
Akhil Padmanabha, Janavi Gupta, Chen Chen, and 5 more authors
In Proceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction, Mar 2024
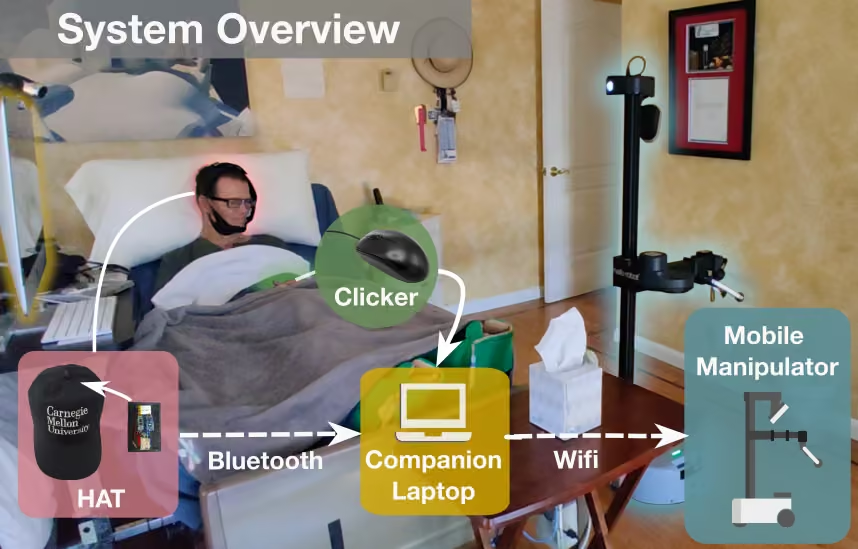
Teleoperation of mobile manipulators within a home environment can significantly enhance the independence of individuals with severe motor impairments, allowing them to regain the ability to perform self-care and household tasks. There is a critical need for novel teleoperation interfaces to offer effective alternatives for individuals with impairments who may encounter challenges in using existing interfaces due to physical limitations. In this work, we iterate on one such interface, HAT (Head-Worn Assistive Teleoperation), an inertial-based wearable integrated into any head-worn garment. We evaluate HAT through a 7-day in-home study with Henry Evans, a non-speaking individual with quadriplegia who has participated extensively in assistive robotics studies. We additionally evaluate HAT with a proposed shared control method for mobile manipulators termed Driver Assistance and demonstrate how the interface generalizes to other physical devices and contexts. Our results show that HAT is a strong teleoperation interface across key metrics including efficiency, errors, learning curve, and workload. Code and videos are located on our project website.
@inproceedings{padmanabha24independence,address={Boulder, CO, USA},author={Padmanabha, Akhil and Gupta, Janavi and Chen, Chen and Yang, Jehan and Nguyen, Vy and Weber, Douglas J and Majidi, Carmel and Erickson, Zackory},booktitle={Proceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction},doi={10.1145/3610977.3634964},isbn={9798400703225},month=mar,pages={542--551},publisher={ACM},title={Independence in the Home: A Wearable Interface for a Person with Quadriplegia to Teleoperate a Mobile Manipulator},urldate={2024-03-12},year={2024}}